Low-Budget-3D-Drucker für etwa 600€ in 6 Monaten fertiggestellt.
Projektbeschreibung aus Lehrersicht: "Hurra, noch ein Projekt! Zunächst war ich wenig begeistert als 4 Schüler der 12ten Klasse an mich herantraten, ob ich nicht eine AG mit ihnen machen würde. Einen 3D-Drucker wollten sie bauen, nicht etwa unsere vorhandenen 2 Ultimaker nutzen, sondern einen 3D-Drucker komplett selber bauen! Inzwischen bin ich froh, dass ich mich habe breitschlagen lassen. Die Schüler Finn, Marlon, Max und Sebastian haben mir plausibel die Realisierbarkeit des Projekts darlegen können und der Fachbereich Neue Medien hat sich bereit erklärt die Kosten zu übernehmen.
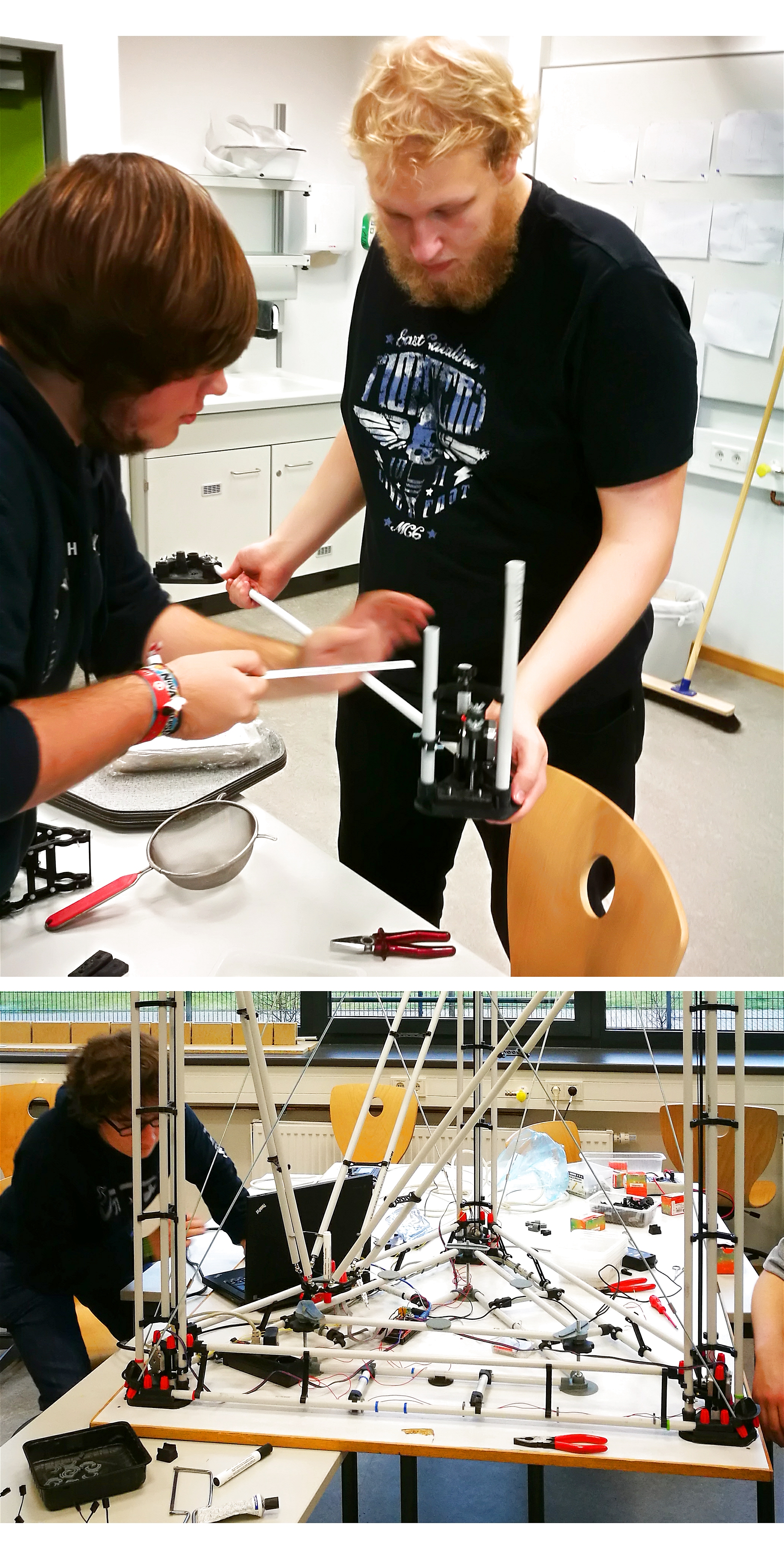
Dann habe ich meinen Wahpflichkurs Klasse 9 gefragt, ob sie Lust hätten mitzubauen, die Oberstufenschüler würden konstrieren, programmieren und sie würden zusammenbauen. Jawoll sie waren dabei, ein jahrgangsübergreifendes Projekt war geboren, Wir bauen einen 3D-Drucker. Wenn wir das aber machen, dann in groß, also einen Riesen-3D-Drucker!"
[Marco Nicolai] .
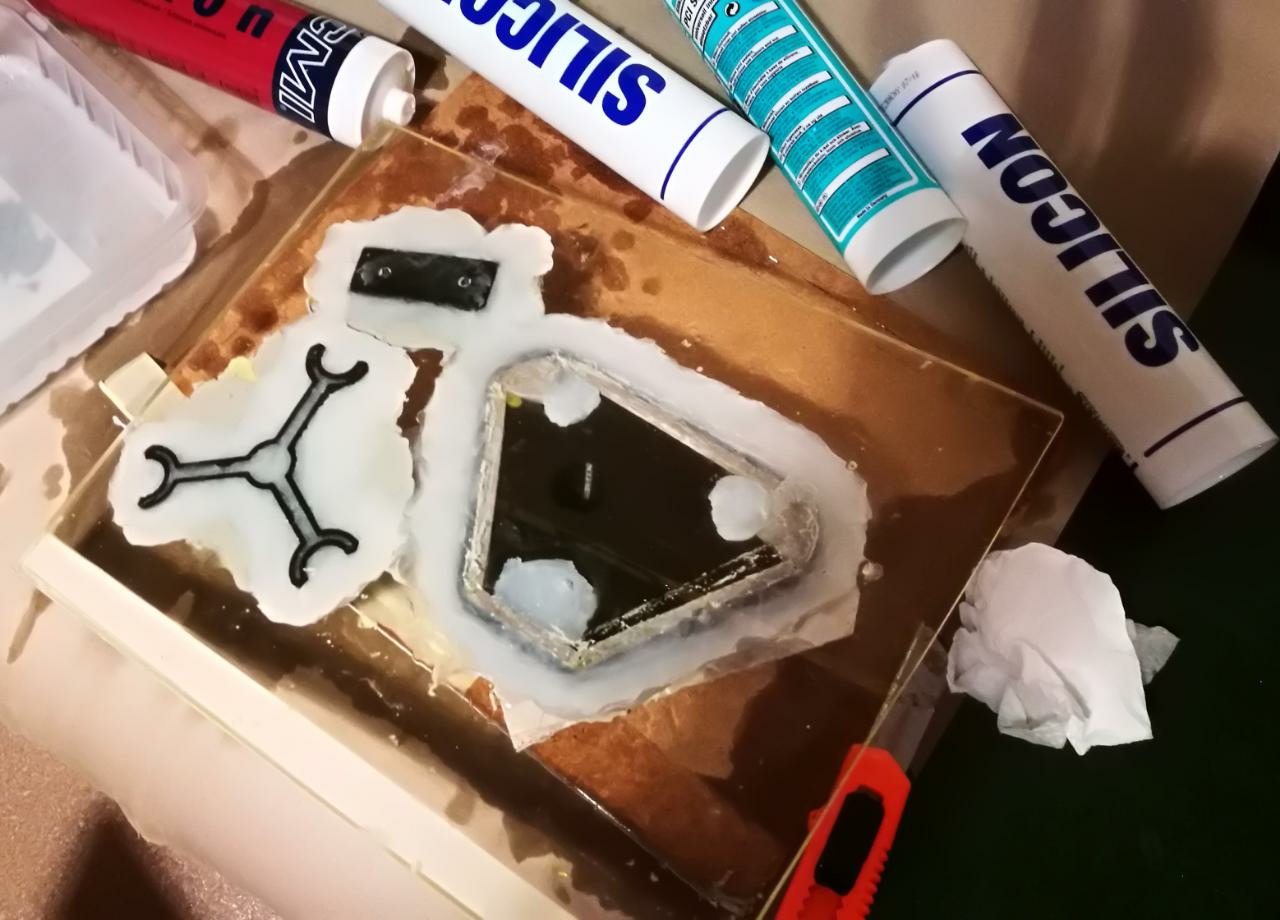
Die Idee. Wofür brauchen wir einen dritten 3D-Drucker??? Wenn wir also einen bauen, dann soll er sich von den beiden vorhandenen unterscheiden. Er sollte größere Objekte drucken können, verschiedene Materialien verarbeiten und zum Experimentieren geeignet sein. 600€ mit Entwicklungskosten sind schon recht sportlich. Da wir 2 3D-Drucker (Ultimaker 2) zur Verfügung haben, konnten wir fast alle Bauteile selbst herstellen. Außerdem haben wir aus dem Flötenbau und dem Planetariumsprojekt Erfahrung in der Kostruktion mit Installationsrohr. Herausgekommen ist ein zwei Meter hoher Riesen-Deltadrucker aus 3D-Druck-Bauteilen und PVC-Rohr. Die Bauteile wurden weitgehend mit dem an unserer Schule etablierten Programm FreeCAD konstruiert und mit PLA gedruckt. Bei einigen Bauteilen haben wir auch Siliconformen von 3D-Drucken abgenommen und diese mit Heißklebematerial gefüllt.
Die Bauteile wurden mit FreeCad so konstruiert, dass sie unterschiedliche Größen des 3D-Druckers zulassen. Eine Skalierung wird dann durch die Längen der Installationsrohre möglich.




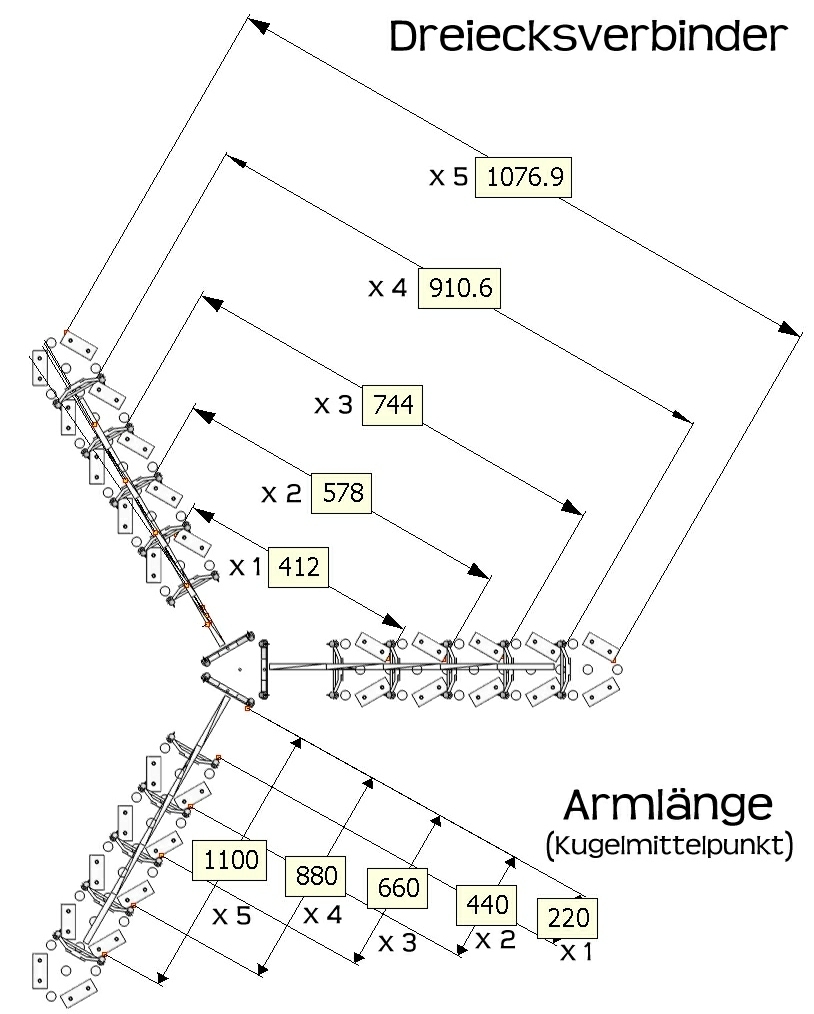


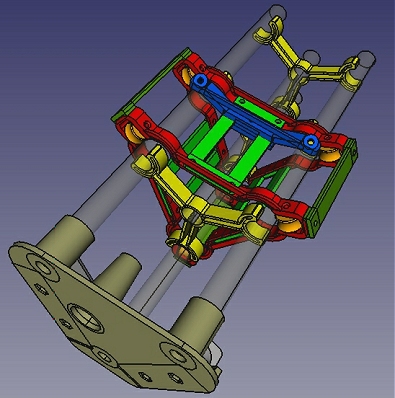
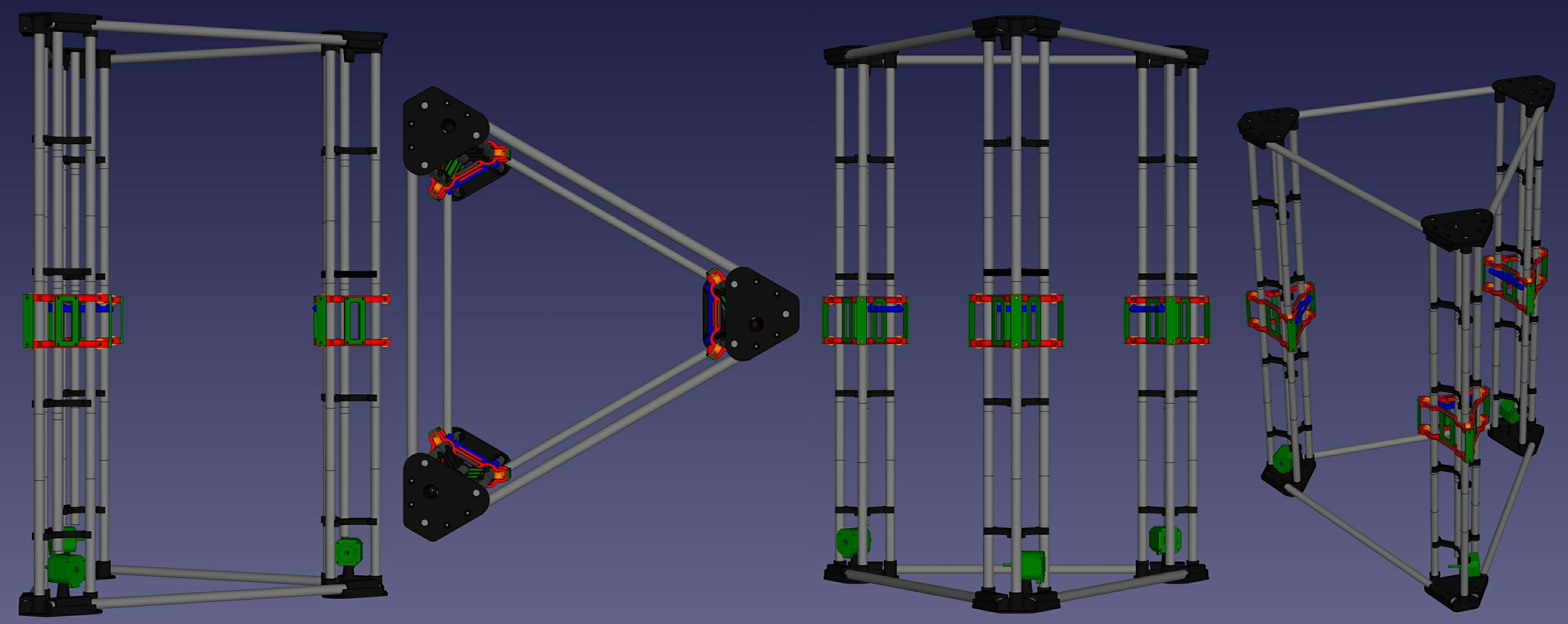
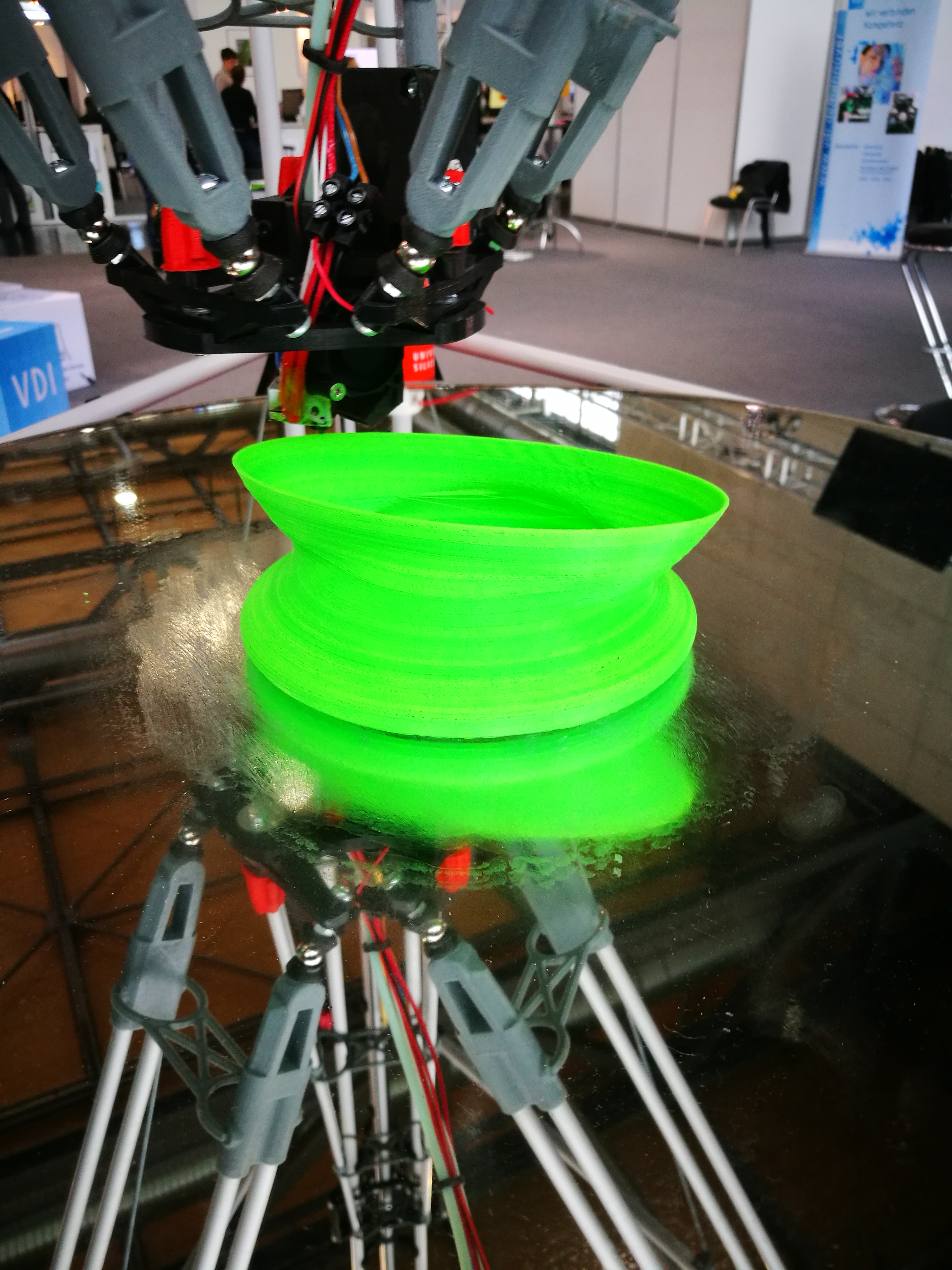
Aufbau Unsere Version des Deltadruckers benötigt drei senkrechte Laufschienen, an denen die drei Arme für den Druckkopf über bewegliche Schlitten befestigt sind. Die Verbindung zwischen Schlitten und Armen einerseits und dem Druckkopf andererseits erfolgt durch Kugelmagneten. Somit kann der Druckkopf leicht gegen einen anderen ausgtauscht werden. Da es nicht ganz einfach war die vorgegebenen Maße für die Längen der Installationsrohre einzuhalten, haben wir Schablonen gebaut, mit denen eine exakte Verklebung und Verschraubung ermöglicht wurde. Die drei senkrechten Laufschienen wurden auf der Grundfläche eines gleichseitigen Dreiecks verbunden. Die Laufschienen bestehen aus drei 16 mm Installationsrohren.
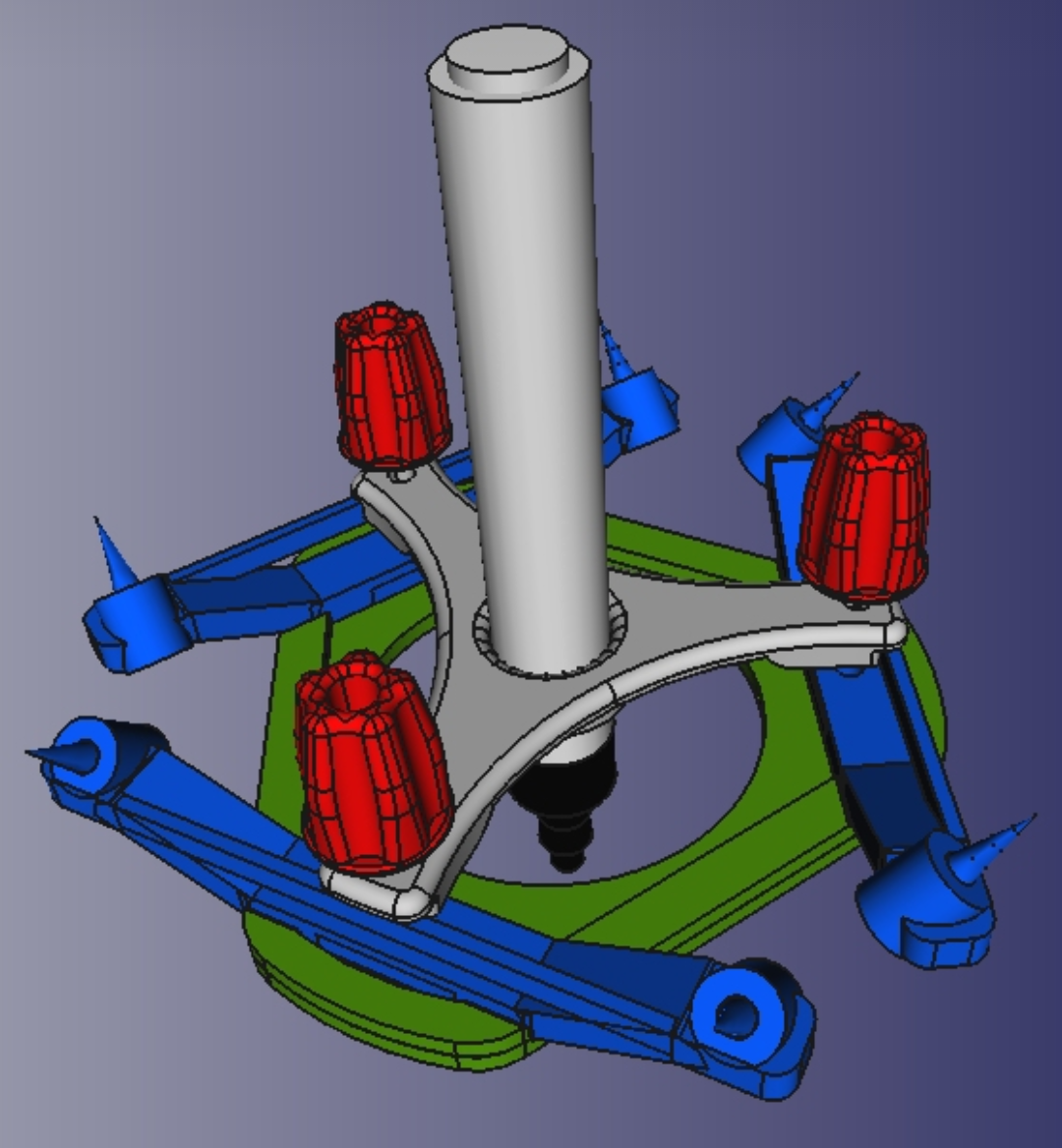
Erster Entwurf:
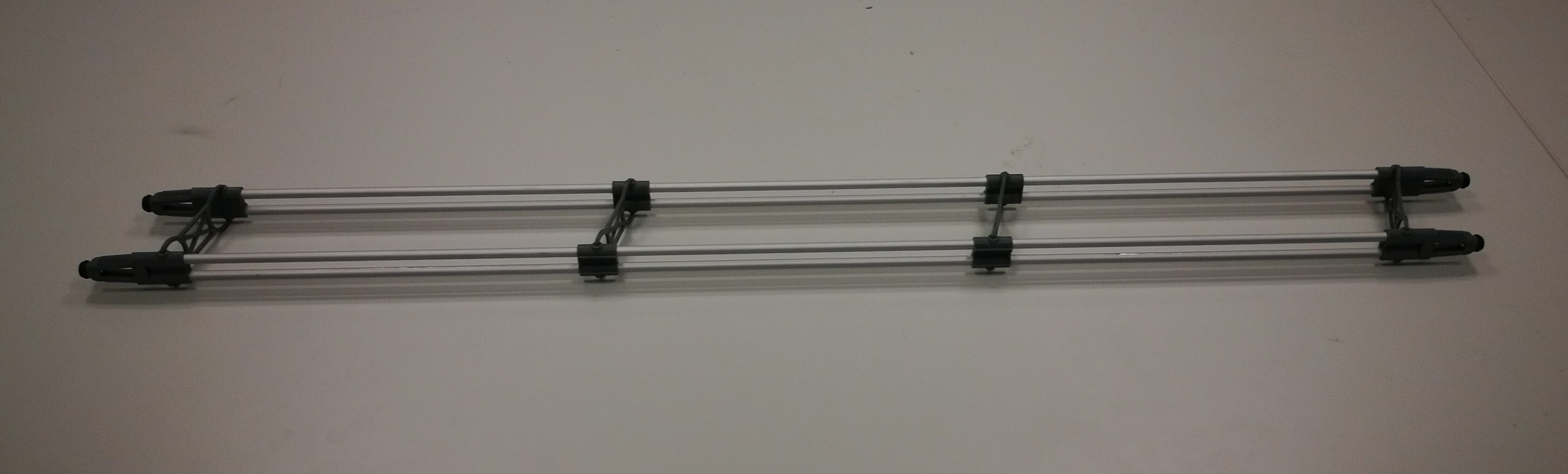
Die Schlitten Jeder Schlitten (Bauteile SLT001 & 007) besitzt 6 Laufrollen, sie dürfen sich nicht verkanten und sollen eine möglicht gleichförmige Bewegung ermöglichen. Das geht tatsächlich ohne käufliche Kugel- oder Gleitlager. Unsere Laufrollen (Bauteil SLT004) sind selbstkonstuiert und werden mit 2,85 mm 3D-Druck-Filament als Achse gelagert. Verschraubt wurden die Schlitten mit Kunststoffschrauben, die sind leichter als Metallschrauben aber auch etwas teurer.
Die Arme stellen bewegliche Parallelogramme dar, somit wird die horizontale Lage des Druckkopfes gewährleistet. Das PVC-Rohr der Arme wurde durch eingerolltes Plakatpapier verstärkt und die Kugelmagneten haften an M4-Muttern an den Enden. Ein Verrutschen der Magnete wird durch Bauteil SLT007 verhindert. Bauteil DMP001 wurde jeweils dreimal zwischen den beiden Kunststoffrohren des Arms eingeklebt.



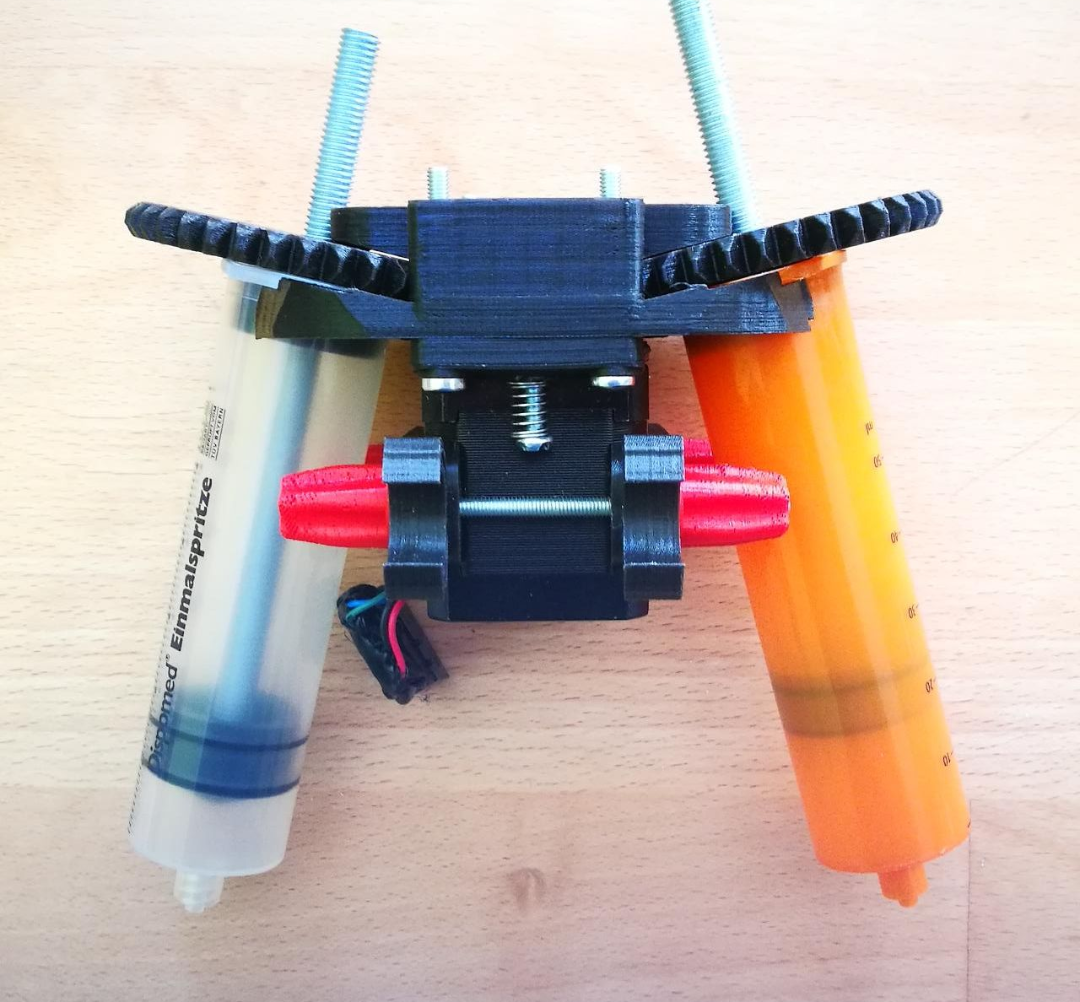
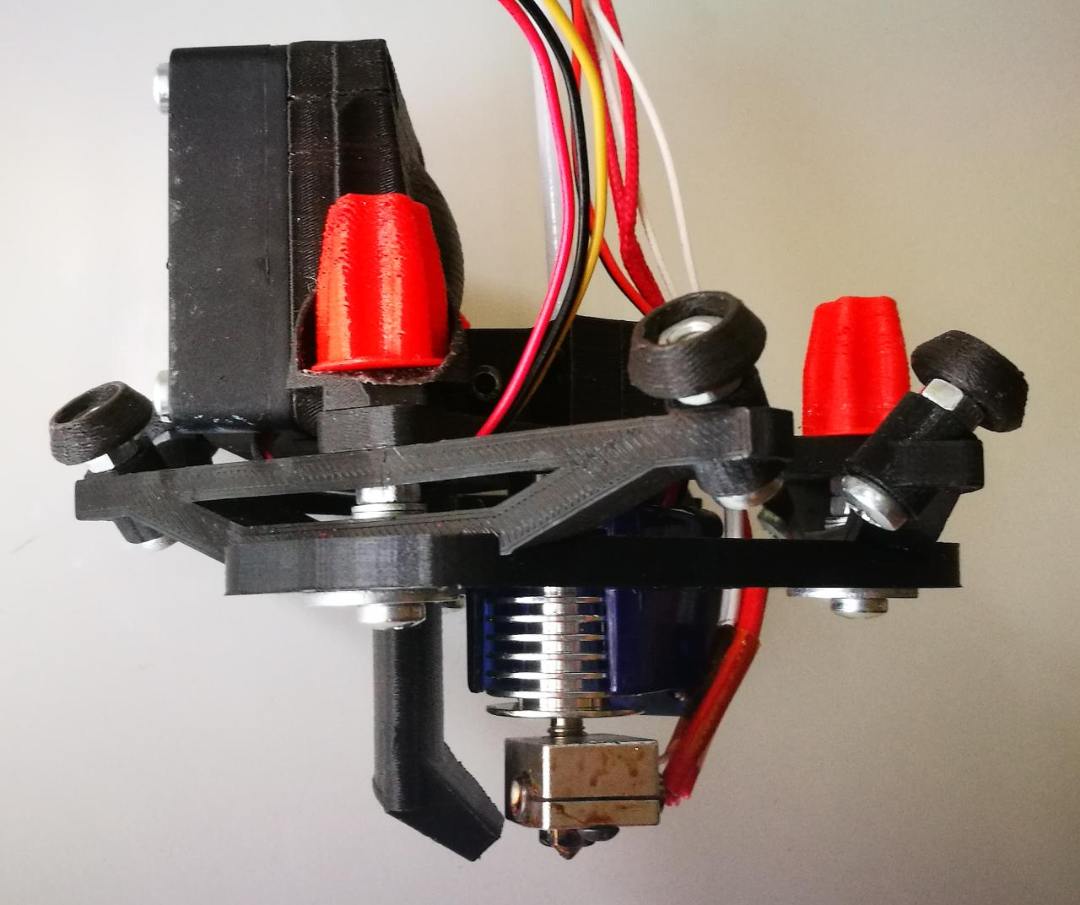
Druckkopf und Antrieb
Ein Tafelfilzstift war unser erster Druckkopf, mit dem konnten wir direkt auf die Bodenplatte (ein runder Ikea-Spiegel) schreiben. Statt des Filzstiftes lässt sich auch eine Schneidplotterklinge einbauen. Auch mit Pfannkuchenteig wurde experimentiert, hierfür gab es zwei unterschiedliche Konstruktionen. Eine mit arbeitet mit einem Seilzug zum Öffnen eines Ventils sobalt die Druckhöhe erreicht ist, eine weitere Konstruktion verwendent Spritzen, die den Teig pneumatisch in die elektrische Crepepfanne drückt. Für letztere wird dann auch der vierte Schrittmotor gegraucht. Diesen benötigen wir auch beim PLA-Druck als Filamentvortrieb. Entsprechend wurde ein Bajonettverschluss für den Motor konstruiert um einen schnellen Wechsel zu ermöglichen.
Für den PLA-Druck kam ein Reprap 1,8 mm hotend und eine zweite Kühlungzum Einsatz.




Elektronik und Stromversorgung
- 4 Schrittmotoren (Nema17) 1,5 A
- Reprap-Extruder
- 3D-Drucker Kit RAMPS 1.4
- zwei 5 V USB-Steckernetzteile
- Laptop-Netzteil 12 V / 50 W

Software
Der RAMS läuft mit einer modifizierten Marlin-Software. Zur Konstruktion von Bauteilen setzen wir hauptsächlich FreeCAD ein und zum Slicen kommt vorwiegend Cura zum Einsatz. für die Modelle zum Pancake-Druck ist Cura (Vers. 15.04.6) nicht gut geeignet, da hier der der z-hop für unsere Zwecke nicht richtig eingestellt werden kann. Daher kam hier Slic3r (Vers. 1.2.9) zum Einsatz. Mit den Einstellungen mussten wir experimentieren gute Ergebnisse haben wir mit folgenden Einstellungen erhalten:


Erste Tests
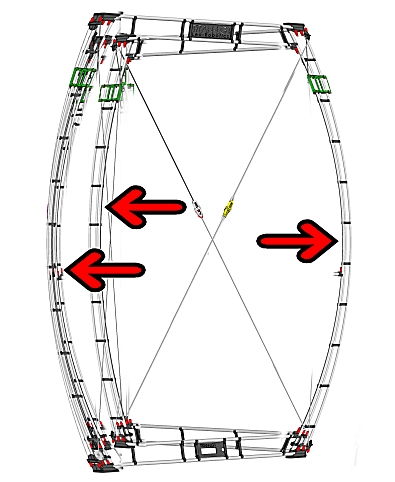
Modifikationen
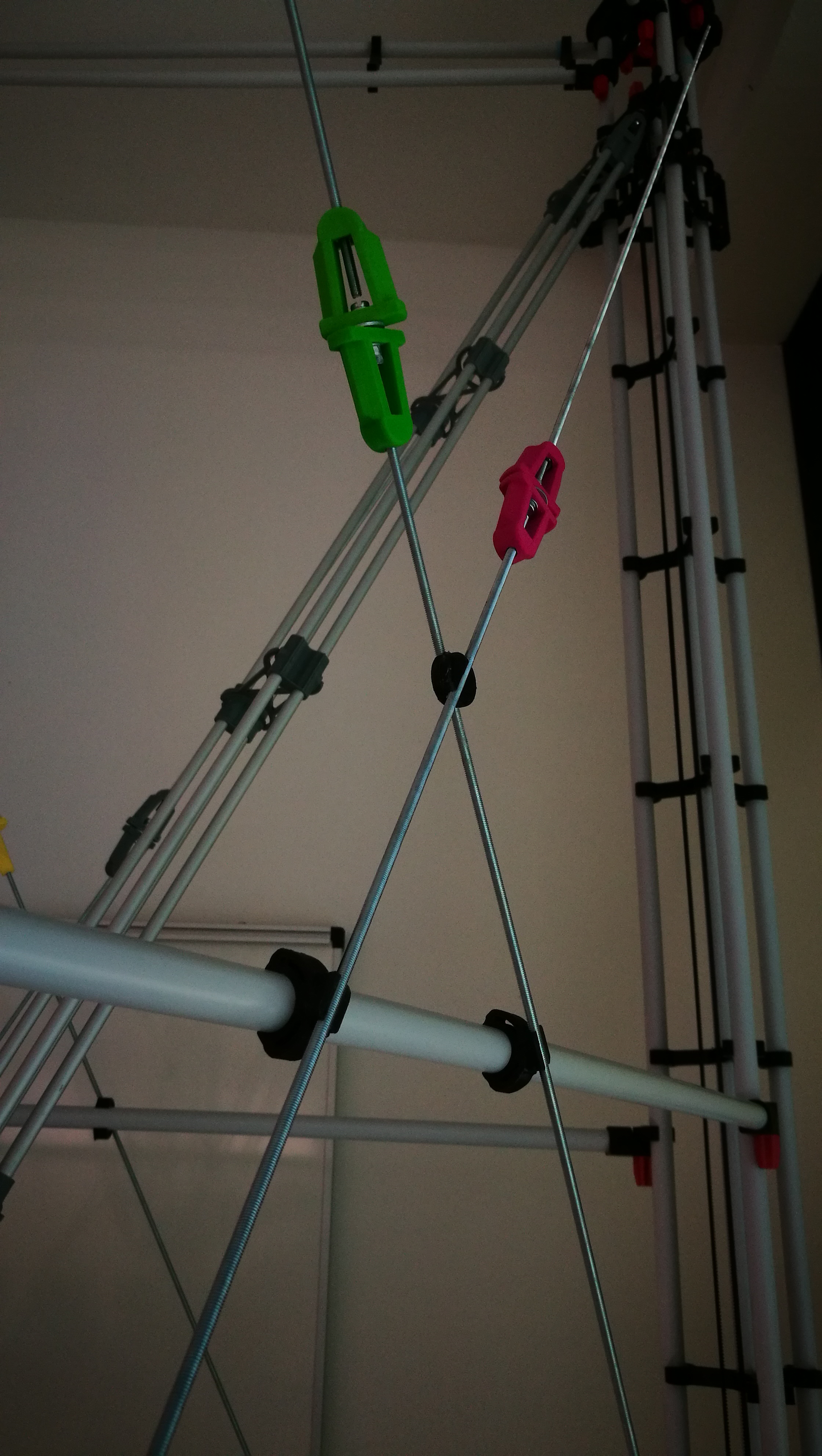
Um unseren Aufbau zu stabilisieren, haben wir Querverspannungen (Bauteile VST001 - VST003) und Horizontalverstrebungen eingesetzt. Allerdings haben wir so drei große "Flitzebogen" beim Verspannen erzeugt und mussten die äußeren Rohre noch mit M14-Gewindestangen stabilisieren und eine Sandfüllung der inneren Rohre brachte ebenfalls eine wesentliche Verbesserung. Gegengewichte zu den Schlitten, die wir direkt in die Zahnriemen einsetzten konnten die Schwingungen nochmals mindern. Schließlich haben wir noch die PVC-Arme gegen eine Version aus Alurohr ausgetauscht. wie schon bei den Plastikarmen verwenden wir auch hier bewegliche Querverstrebungen (DMP004). Einen wesentlichen Anteil haben auch die Slicing-Einstellungen. Insgesamt haben alle diese Veränderungen zu einer wesentlich ruhigeren und genaueren Bewegung des Druckkopfes geführt. Letzlich mussten wir noch erkennen, dass unser Netzteil etwas unterdimensioniert war und haben es durch ein PC-Netztiel 12 V / 15A ersetzt.


Fazit
Der Titan-LG1 ist ein voller Erfolg! Der PLA-Druck ist nach den
entsprechenden Veränderungen besser als anfangs erwartet, Schwingungen
treten nur noch wenig auf. Installationsrohr als Baumaterial ist für einen Drucker dieser Größe nicht gut geeignet, Falls wir den Drucker nochmal bauen müssten, würden wir etwas anderes verwenden.
Als besonders positiv hat sich aber die Vielseitigkeit herausgestellt. Aufgrund der Größe,
sind verschiedene Anwendungen möglich, so ist es überhaupt kein Problem die PLA-Druckplattform
durch eine handelsübliche elektrische Crepes-Bratpfanne zu ersetzen. Dies wäre bei anderen
3D-Druckern kaum möglich. Auch der schnelle unkomplizierte Wechsel der Drucköpfe hat sich im laufenden Betrieb als besonder vorteilhaft erwiesen. Es gibt auch schon Ideen für den Druck von Schokolade und Ton. Insgesamt
ist der Titan-LG ein schöner Experimentaldrucker, mit dem es Spaß macht zu arbeiten.
Druckergebnisse

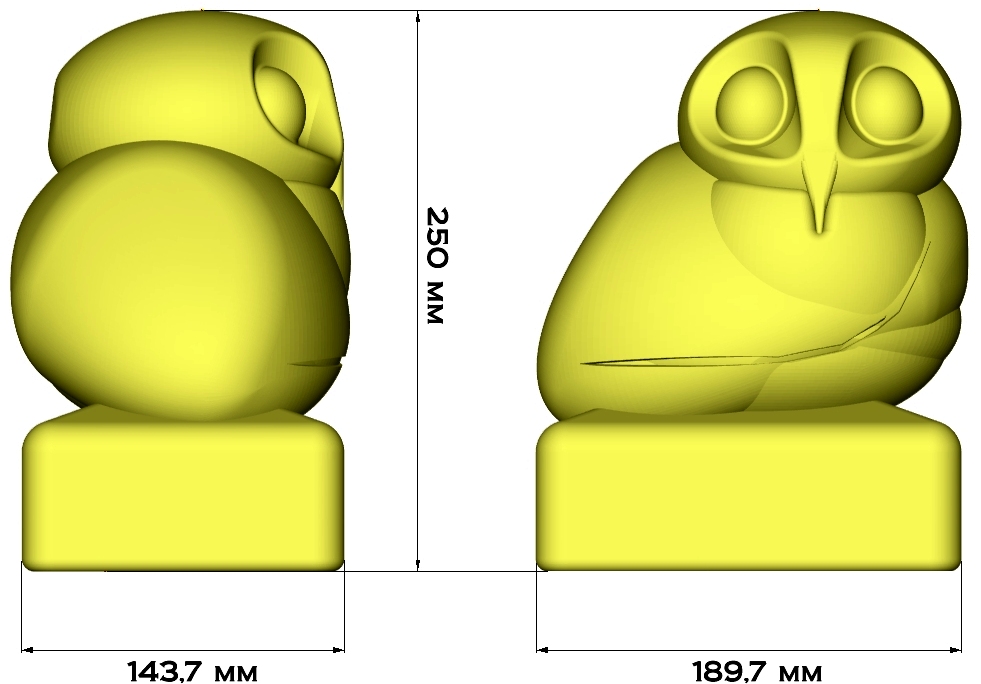
Feb. 2019: Druck unserer Schuleule.
(1 mm Düse, ~300 g Material, 25 cm Höhe, 11,5 h Druckzeit)